品牌
生产厂家厂商性质
杭州市所在地
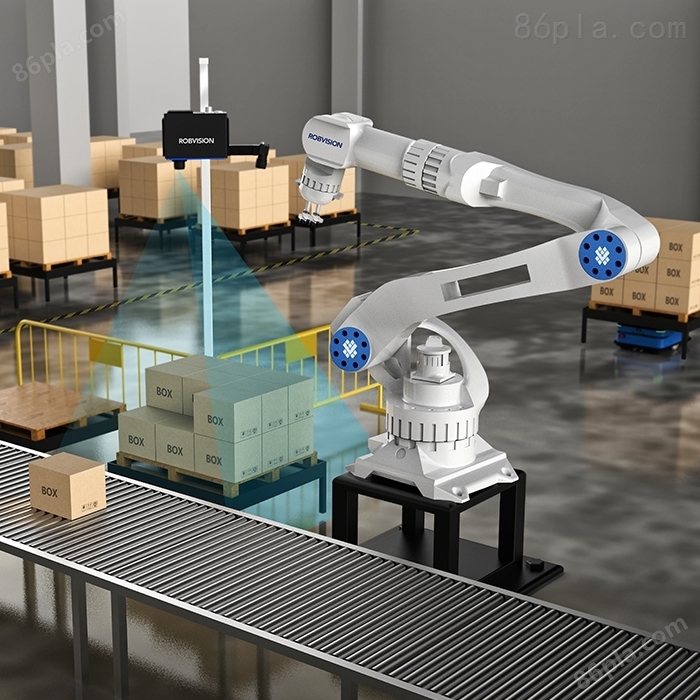
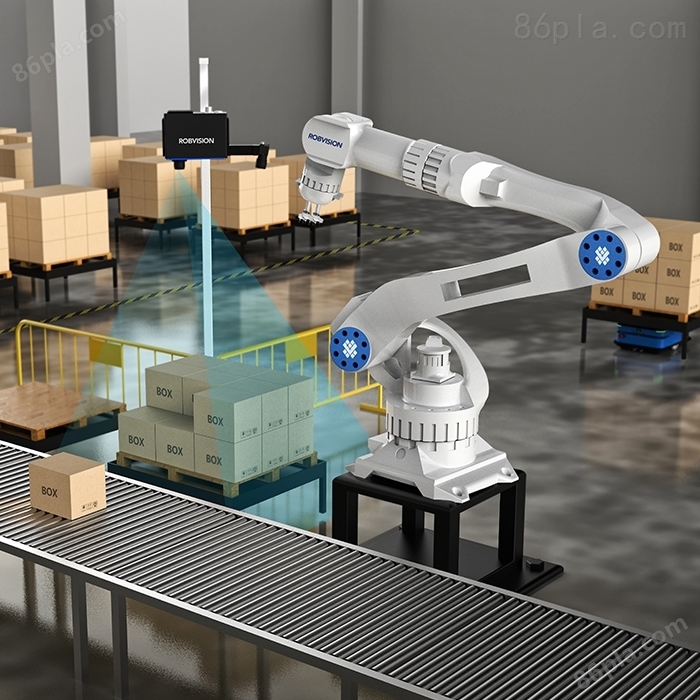
3D视觉零件拣选,由3D成像单元和运动路径规划单元组成,实现了机器人的“眼睛”与“大脑”功能。
机器视觉技术常常用于定位与导引,提供机械手或其它执行机构以准确的二维或三维坐标,进行路径规划,引导机械手完成规定的作业和任务。定位与导引系统往往和其它系统一并构成较复杂的技术系统,实现特定的功能,满足需求。

3D视觉零件拣选技术原理:通过高速、精确的3D结构光成像系统,对物体表面轮廓进行扫描,形成点云数据;并对点云数据进行智能分析处理,加以AI算法、机器人路径自动规划、自动防碰撞等智能化技术;计算出当前工件实时空间坐标,并引导机器人完成自动抓取任务。
可以完成以下任务:
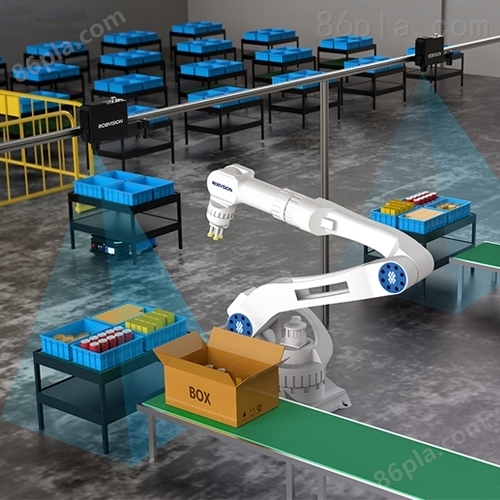
1、多品种工件的机器人3D定位抓取上料
2、料框堆叠物体3D识别定位
3、复杂多面工件的柔性化3D定位抓取
4、大型物体3D定位抓取
5、工件的无序来料3D定位
6、多工序间机器人协作3D定位抓取
7、输送带上物体的快速3D定位抓取
8、喷涂机器人来料3D识别定位
9、大型设备的机器人装配3D定位
产品参数:
|
| WuKong-0230B | WuKong-0230C | WuKong-0300B |
| 描述 | 为零件分拣设计,适用于各种金属、黑色零件。 | RGBD同时成像,大视野,适用于快递、零食、药品等商品分拣 | 可精确扫描,适用于扫描电子PCB板等小物体。 |
| 像素 | 2.3M | 2.3M | 3M |
| 视野(mm)★ | 375*235~2000*1250 | 375*235~2000*1250 | 389*243*80 |
| 扫描时间(s)★ | 快0.2 | ||
| 工作距离(s)★ | 0.45~2.4 | 0.45~2.4 | 0.7 |
| Z轴精度★ | 0.4mm@1m | 0.6mm@1m | 0.1mm@0.7m |
| 数据接口 | RJ45以太网(Gige) | ||
| 供电 | DC12V 6A | ||
| 体积 | - | - | - |
★号部分表示根据实际应用在此范围内可定制;