品牌
生产厂家厂商性质
杭州市所在地
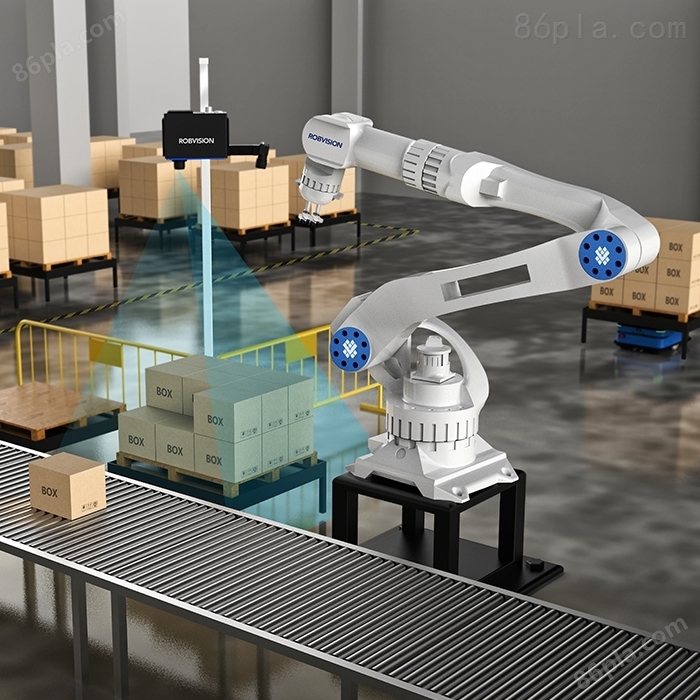
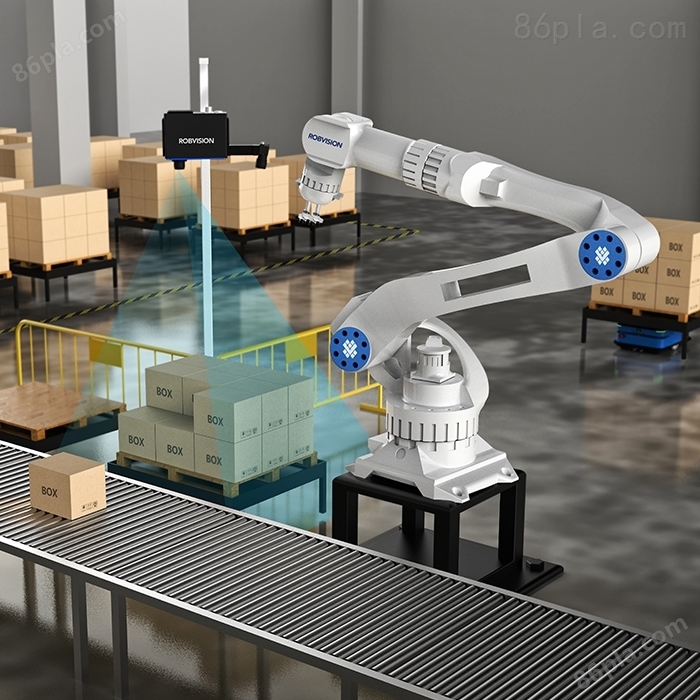
输送带分拣
在汽车发动机缸体模具浇铸车间,环境较差,布满灰尘。缸体模具尺寸大,重量大,需要工作来用机械设备吊运砂芯,步骤繁琐。为了避免砂芯损坏,需要格外小心,导致生产效率极低,而且砂芯旋转姿态不到位,会严重影响下一道工序。砂芯旁侧和下侧都是高温模具,人工操作存在巨大安全隐患。需要我方提供解决方案实现自动化生产过程。
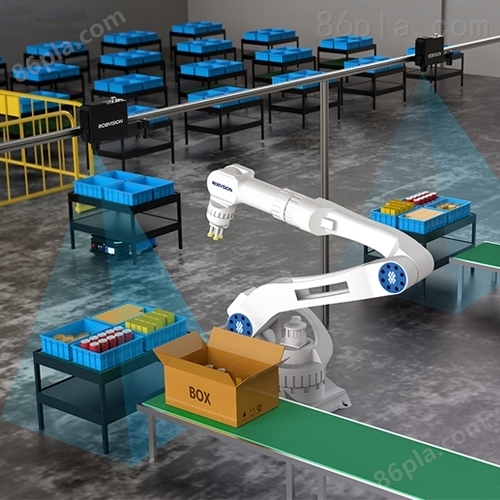
针对上述场景我司自主研发的悟空3D视觉传感器可以采集深度图时可以同时应对黑色或者反光表面,输出高质量RGBD信息。
解决方案:
通过机器人3D定位系统,引导机器人从输送线抓取砂芯到位置
通过3D视觉方案实现三维扫描定位
选用定制兼容型适合大视野的产品型号
选用特定型号的高荷载机器人
机器人3D定位系统具备IP65防护等级,可适应现场环境
智能定位算法和运动规划
自主研发的智能定位算法可以输出物体的空间坐标和姿态,配合智能运动规划算法,可以使工业机器人像人一样智能的抓取。
输送带分拣技术参数:
| HS0122-B | HS0121C | HS0123-B | HS2112-R | |
描述 | 为零件分拣设计,适用于各种金属、无纹理零件。 | RGBD同时成像,大视野,适用于快递、零食、药品等商品分拣 | 可精确扫描,适用于扫描电子PCB板等小物体。 | 红外光源,超紧凑,适用于对相机尺寸重量有要求的场合 | |
像素 | 2.3M | 2.3M | 2.3M | 1.3M | |
视野(mm)★ | 310*195~1630*1020 | 350*218~1830*1145 | 389*243*100 | 717*573*500 | |
扫描时间(s) | 0.2 | ||||
工作距离(m)★ | 0.52~1.7 | 0.52~1.7 | 0.7 | 0.7 | |
Z轴精度 | 0.4mm@1m | 0.6mm@1m | 0.1mm | 1mm | |
数据接口 | RJ45以太网(Gige) | ||||
供电 | DC12V 6A | ||||
体积 | - | - | - |
| |