品牌
生产厂家厂商性质
济南市所在地
济南恒乐仪器自升降反力架系统
济南恒乐仪器自升降反力架系统
电液伺服加载系统
多通道协调加载
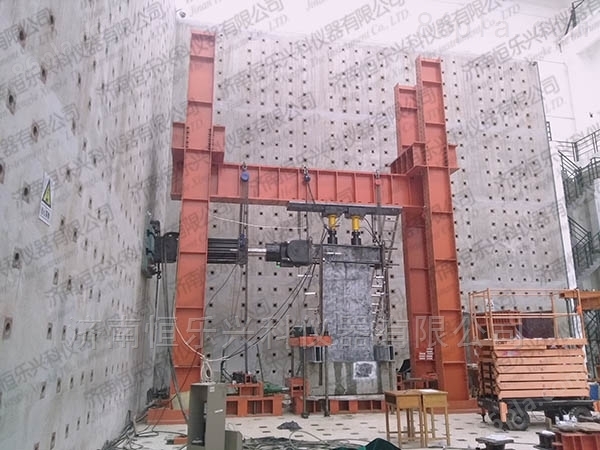
水平加载系统
拟动力加载试验
千斤顶检定装置
多功能结构力学试验装置
自升降反力架
钢桁架静载荷实验系统
长柱结构试验系统
钢桁架加载试验系统
电液伺服多功能结构试验系统
反向架
自平衡反力架
自平衡反力系统套装
大型结构试验系统
简支梁反力框架试验系统
构件疲劳试验系统
钢筋混凝土梁虚拟受弯试验系统
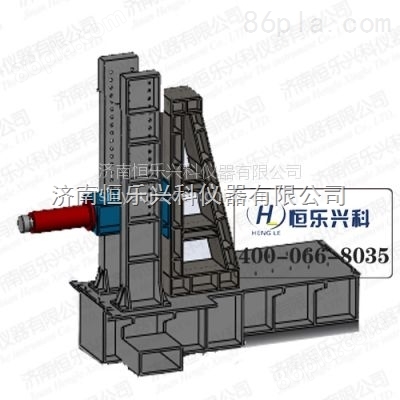
自升降反力架系统

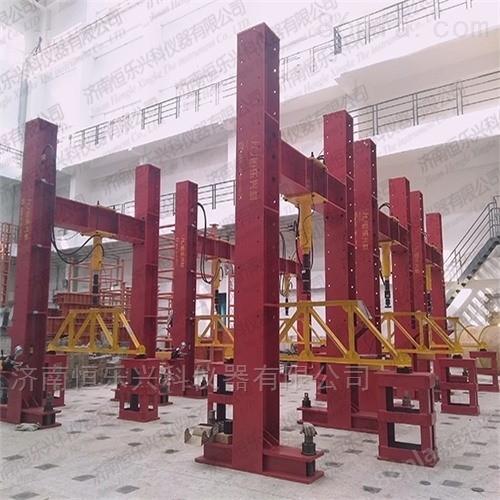
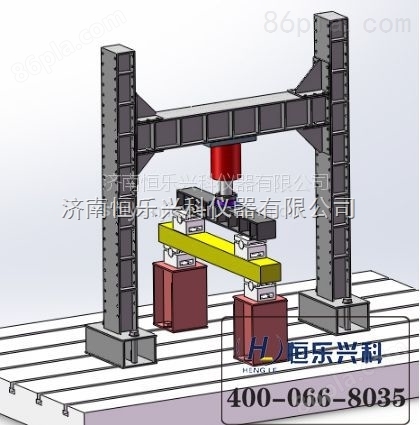
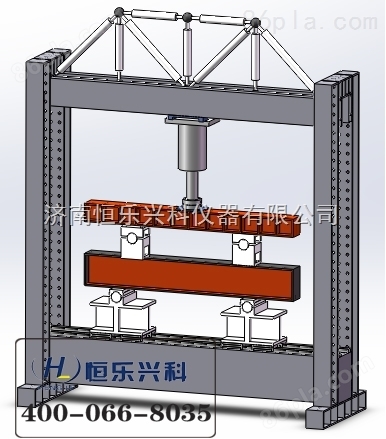
一、加载反力架
1.加载反力架采用四立柱框架结构,立柱可通过地脚拉杆与实验室台座锚孔连接,主梁可自动升降,到达固定位置后可通过螺栓锁紧,主梁采用箱型截面设计,采用中间镂空的双梁结构;
2.四立柱轴间距为不小于4m×2m,立柱不高于7m,大试验高度不小于4.5m;
3.竖向作动器采用前法兰安装,作动器高度与主承载梁高度共用,增加实验空间;
4.加载反力架竖向承载力不小于4000kN、水平承载力不小于1000kN,额定荷载下反力架各构件大变形量不大于跨度的1/1000;(提供加载设备三维、效果图、有限元变形及应力分析报告复印件)
5.钢构件材料均为Q355B结构钢,焊后消除焊接应力;构件工作面均进行机加工,表面粗糙度不大于R3.2;钻孔采用数控加工的方式,间距误差±0.1mm;钢构表面喷漆前喷砂除锈;
6.配置四根立柱,Ⅱ型结构,尺寸不小于375×375×6000mm,抗拔承载力不小于1000kN;侧面按125mm模数加工安装孔,保证横梁高度按模数调整;
7.配置上部副梁4支,槽型结构,横截面尺寸不小于500×200mm,梁跨中承载力不小于1500kN;
8.配置下部副梁4支,槽型结构,横截面尺寸不小于250×200mm;
9.配置主梁1支,采用箱型截面中间镂空的双梁结构,横截面尺寸不小于900×1100mm,承载力不小于3000kN;下部设置通长直线导轨,可在其上安装随动小车平台;
10.台座拉杆及螺母16根,尺寸不小于1300×φ64mm;垫板16个,尺寸不小于180×180×20mm。
11.配置随动小车平台2套,用于安装竖向作动器,采用直线导轨滑块的方式;承载力不小于2000kN;额定荷载下滑动摩擦系数≤1%;
12.水平作动器连接板1件,用于连接作动器及反力墙;T型槽板结构,作动器高度可连续调节,承载力不小于1000kN。
二、竖向作动器
1.竖向作动器采用,前法兰安装,单出杆结构,大压缩荷载不小于2000kN,大拉伸荷载不小于500kN,作动缸满行程不小于300mm (±150mm) ,配拉簧式万向球铰;
2.满荷载对应的工作压力不大于25MPa,油缸耐压不小于30MPa,启动压力小于0.1MPa;
3 .配置有2000kN载荷传感器,可以承受不低于满量程50%大过载,载荷传感器精度(非线性、迟滞、重复性等)不低于满量程的0.1%;
4.作动缸同轴安装有安装磁置伸缩式位移传感器;
5.配套作动器提升吊环与安置地垫,提升吊环用于平衡吊装作动器,安置地垫用于防止放置作动器时意外损坏;
6.所有控制电缆及接头应满足屏蔽性好、抗干扰性强、结实耐用、易安装要求,长度以实际场地要求为准;
7.所有液压软管及接头应满足抗压性好、密闭性好,易安装,液压管道长度以实际场地要求为准。
三、伺服控制系统
1.伺服控制系统与伺服油源配合使用,可实现不少于4个作动器的力、位移电液伺服闭环控制协调加载;
2.试验软件可根据用户给定的数据进行设计,能进行压剪实验竖向双缸协同加载,采用主动控方案确保实验过程中L梁始终保持水平状态。同时提供三缸同步的控制系统,压剪试验时竖向两次缸采用位移跟随主缸、加载力的和为定值的控制方式,压梁两端高差不大于0.2mm。可有效保证加载横梁水平。(提供竖向加载双缸协调案例说明,并做技术特点分析,格式自定)
3.系统在全程闭环控制状态下,应具备力控、位移控制等多种控制功能,并且在试验过程中应能够实现所有控制方式以及控制速率的任意无冲击平滑切换;
4.控制系统的主要参数(荷载、位移等)应能通过模拟输出或数字输出等形式将系统信号传输给外部数据采集系统,实现控制系统与外部数据采集系统进行同步采集的功能要求;
5 .拟采用的伺服控制系统需具或软件著作权证书
6.配置拟动力实验软件1套
6.1软件应具有良好的用户界面,试验前能够交互式输入地震加速度时程曲线,选取试验所需范围的加速度时程,建立楼层的滞回模型。
6.2试验过程中能够实时显示各楼层的地震响应时程曲线、楼层的滞回曲线、结构振动动画,以及与试验设备之间的指令和反馈数据交互。试验结束后能显示楼层的滞回曲线,输出子结构拟动力试验的相关结果。
6.3试验软件能够和电液伺服试验系统控制软件连接通讯,能够将结构时程分析得到的试验子结构加载指令发送给试验控制系统,并实时获取试验子结构的位移和力响应,能够设定相关的判断准则来决定结束一个试验步,保证子结构拟动力试验平稳进行。
6.4试验软件需要具有网络化的试验功能;
6.5拟动力实验系统、虚拟仿真软件需具有软件著作权证书。(
7.配备在线式UPS电源,UPS与多通道数字控制器系统实时通讯,当出现电池电量低、外部电源断电等意外时,能够自动停止当前试验并保存所有试验数据;
8.配压剪模型1套,采用装配式结构,可组装成单榀多层框架模型、框剪结构模型等,可进行单榀多层框架内力分布实验、压剪滞回实验等,模型杆件刚度可调,至少配三种刚度的杆件,且刚度比不小于3,基础杆件截面尺寸不小于50x50mm;横梁和立柱之间联接可刚接、可铰接,可任意转换;可承受竖向荷载不小于1000kN,水平荷载不小于250kN,总高度2m,层数可调,不少于3层;实测实验数据与理论值比误差小于5%;
9.配置钢筋混凝土虚拟仿真软件1套:虚拟仿真需包含场景仿真、实验原理仿真、实验操作仿真、解析解仿真、有限元仿真、相关测试技术五个模块;其中场景仿真需采用沉浸式的三维仿真环境,提供360度体验,通过3D仿真实验装置交互式操作,产生和实际操作一致的实验过程和现象;解析解仿真需要提供完整的可修改的系列变量算例模型,可选少筋梁、适筋梁、超筋梁3种典型试件,钢筋直径、砼强度等均可连续变化;操作过程仿真需包含试件安装、加载、数据采集等步骤,需与实际操作相符,需展示实验过程中加载测试方案、试件的变形、需要测试的实验数据及数据的变化趋势、数据采集分析方案等;有限元仿真需要提供算例库,并采用PPT格式文件对算例进行总结。
四、伺服油源系统
1.采用伺服电机驱动油泵,可根据工作需要调整转速,系统流量不低于10LPM;
2.油源压力可分手动控制和伺服控制两种控制模式,手动控制压力输出不少于2路,0-28MPa连续可调,伺服控制压力输处不少于3路,0-28MPa连续可调,可进行荷载、位移闭环控制;
3.采用触摸屏作为伺服控制操作终端,可实时显示各通道系统参数,同时设有手摇脉冲发生器作为手动控制单元;
4.根据现场实际需要配置冷却系统;
5.根据试验系统要求提供全部工作用油;
6.当油源出现油温过高、油压过低、电机过流等异常情况时,油源系统均有自我保护功能。
五、自升降系统
1.采用丝杠立柱副结构,丝杠数量为4支,丝杠直径不小于180mm,横截面为实心,沿加载架反力架通高布置,丝杠能承受不小于3000kN竖向荷载;
2.采用伺服电机驱动螺旋升降机构控制横梁升降,横梁的升降范围为0.5-4.5m,保证能完成试件高度为0.5m-4.5m的竖向加载;
3.配置位移传感器,监测四个拉螺母升降同步情况,不同步误差小于0.1mm;设有不同步报警及处置模块,不同步上限可设定,达到设定后,升降电机会自动停止运行;
4.提供上横梁双梁、上横梁自爬升案例说明,总案例不少于3个,并做技术特点分析。